基于搜索的多机器人路径规划
基于搜索方法的多机器人路径规划
1 冲突基搜索(Conflict-Based Search)
为了解决多机器人通过各自规划出来的轨迹存在冲突的问题,使用中心化的约束树(Constraint Tree)去解决这些冲突的问题。
约束树的节点包括以下几个部分:
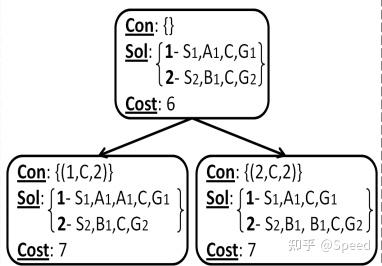
constraints:约束(agent, position, time)代表某个智能体在某个时间不能去到这个位置solutions:所有智能体在约束条件下规划的轨迹cost:所有智能体轨迹的代价总和
而约束由母节点的 solutions 获得的第一个冲突(conflict) ,表示智能体 和 在时间 ,同时到达点 的冲突。子节点的约束就可以分成两个 和 。如果母节点已经有约束,那么子节点除了冲突分出来的约束,还要继承母节点的约束。
这样从母节点开始,在获得冲突,分支,计算在约束下的解以及代价,并在下次选择还未分支的节点(这些节点可以是不同层级的)中代价最小的一个节点不断循环。直到有节点代价最小且没有冲突。
例子:

约束树
伪代码

- OPEN:相当于一个以代价为优先级的优先队列(相当于 Constraints Tree)