搜寻式路径规划
传统路径搜寻算法
针对可以表示成图(Graph),即包括节点(node)和边(edge)的地图,可以使用搜索的方法找到从起始点到终点最短的一条路径。
1 广度优先搜索算法(Breadth First Search)
将起始点作为边界,向相邻节点搜索,将新探索点作为边界,在下一轮作为中心点,继续对相邻节点进行探索,直到终点作为中心点时结束。探索的顺序是先进入边界队列的,在下一轮中优先被探索。
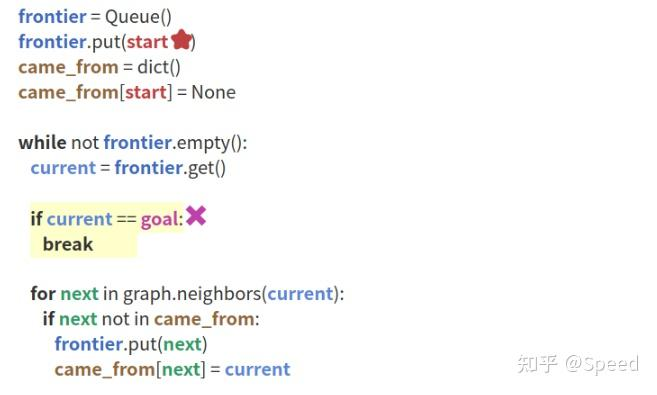
在这个算法中:
frontier是一个队列,用于存储待探索的节点came_from是一个映射,用于记录每个节点的来源,便于回溯路径- 算法按照"先入先出"的顺序探索节点,保证找到的路径是最短的(按边数计算,相当于固定每个边的长度是 1)
2 Dijkstra 算法
由于 BFS 算法是按照"先入先出"顺序探索节点,无法在边长不一时找到最短路径。就采用计算出发点到探索点的距离作为探索优先级,到出发点距离越短的点,优先级越高,最先被探索。
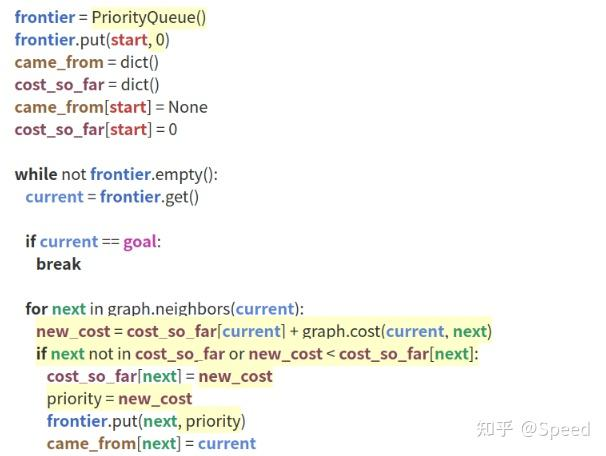
算法中:
cost_so_far计算原点到当前节点距离,并将其作为被探索点的优先级,并按照此优先级作为探索顺序。- 同时为了保证与原点距离最短的点先被探索,当
cost_so_far改变时,该点即使探索过了,依然会再次进入边界队列。
3 最佳优先探索算法(Greedy Best First Search)
为了减少探索次数,将探索顺序换成距离目标最近的点,优先级最高,最先被探索,该方法效率高,但不一定是最优路径。
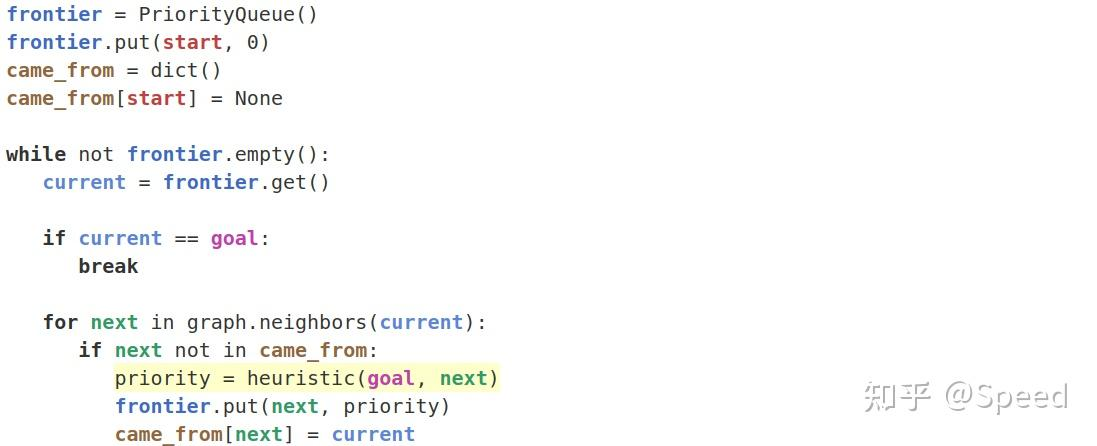
heuristic就是当前点与目标的距离(可以是欧式距离或曼哈顿距离)
因为利用目标信息进行搜索,所以称为 heuristic(启发式)。
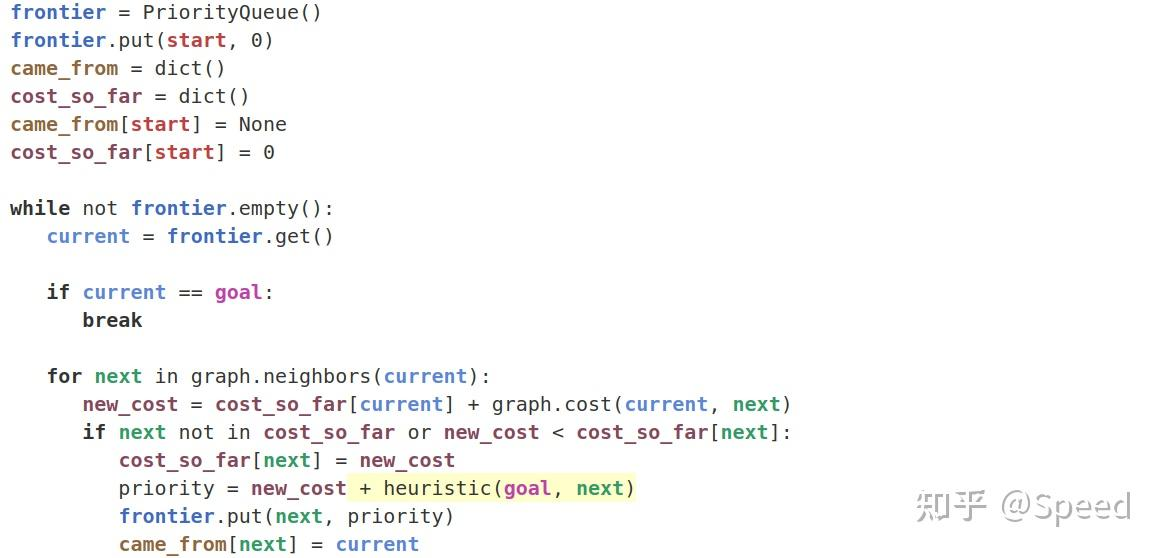
4 A* 算法
结合 GBFS 和 Dijkstra 算法,即保证最优性(路径最短)又保证探索效率,将探索顺序换成到起始点距离加上到终点距离作为优先级